
























作品詳情
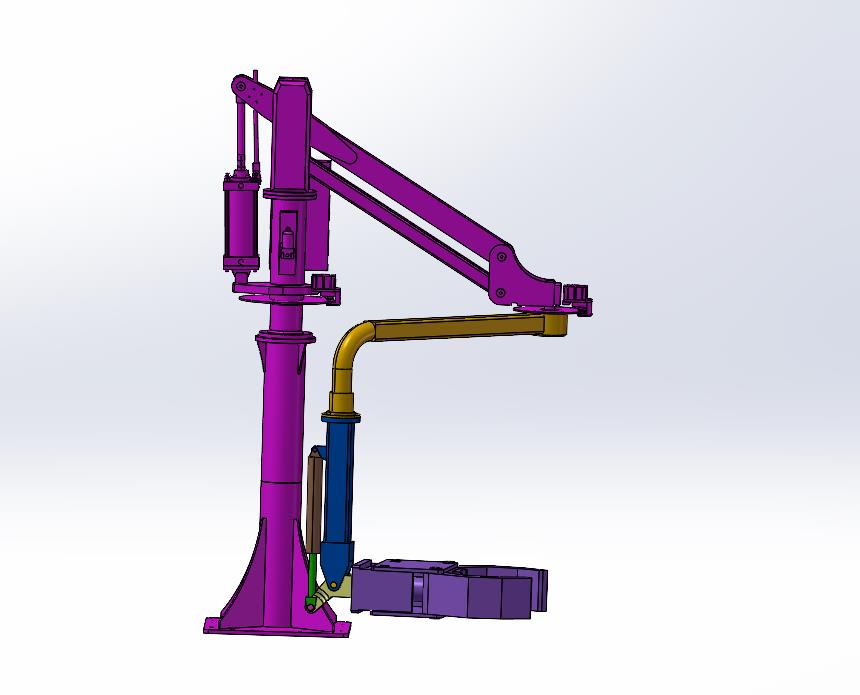
單立柱移動式平衡全氣動助力抓手是一種高效、靈活的工業(yè)設備執(zhí)行部件。其采用單立柱結(jié)構(gòu)設計,具有移動便捷、穩(wěn)定性強的特點。通過全氣動助力系統(tǒng),提供強大的抓取和搬運力量,適用于多種工作環(huán)境。其精準的控制系統(tǒng)和高效的執(zhí)行效率,使其在工業(yè)領域有著廣泛的應用前景。
全國咨詢熱線: 152 1011 0562 


平diy桌面級快速成型3D打印機")









動臺袋子印畫設備")





