
























作品詳情
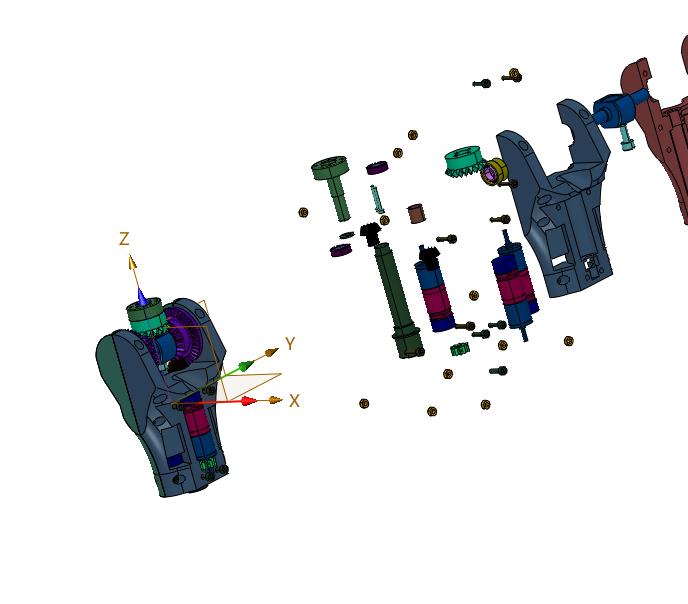
機器人關(guān)節(jié)和手腕結(jié)構(gòu)圖是機器人技術(shù)中的核心組成部分。關(guān)節(jié)設(shè)計通常采用多種類型,如旋轉(zhuǎn)關(guān)節(jié)、彎曲關(guān)節(jié)等,以實現(xiàn)機器人的靈活運動。手腕結(jié)構(gòu)則是連接機器人手臂和工具的關(guān)鍵部分,通常包含多個關(guān)節(jié)以完成精細操作。這些結(jié)構(gòu)圖詳細展示了關(guān)節(jié)和手腕的部件布局、運動方式和相互連接方式,是機器人制造、維護和操作的重要參考。


平diy桌面級快速成型3D打印機")









動臺袋子印畫設(shè)備")






